


–£—З–µ–љ–Є –Њ—В —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В–∞ –≤—К–≤ –Т–∞—И–Є–љ–≥—В–Њ–љ —Б—К–≤–Љ–µ—Б—В–љ–Њ —Б Allen Institute for AI —Б–∞ –Њ–±—Г—З–Є–ї–Є –љ–µ–≤—А–Њ–љ–љ–Є –Љ—А–µ–ґ–Є –і–∞ –Є–љ—В–µ—А–њ—А–µ—В–Є—А–∞—В –Є –њ—А–µ–і–≤–Є–ґ–і–∞—В –њ–Њ–≤–µ–і–µ–љ–Є–µ—В–Њ –љ–∞ –Ї—Г—З–µ—В–∞—В–∞. –Ю–Ї–∞–Ј–≤–∞ —Б–µ, —З–µ —В–Њ—З–љ–Њ —В–µ–Ј–Є –ґ–Є–≤–Њ—В–љ–Є –Њ—Б–Є–≥—Г—А—П–≤–∞—В –Є–љ—В–µ—А–µ—Б–љ–Є –≤—К–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –Ј–∞ –Є–Ј–Ї—Г—Б—В–≤–µ–љ–Є—П –Є–љ—В–µ–ї–µ–Ї—В –Є –љ–Њ–≤–Є –љ–∞—З–Є–љ–Є –љ–∞ –Ї–Њ–љ—В—А–Њ–ї–Є—А–∞–љ–µ –љ–∞ —А–Њ–±–Њ—В–Є. –Ч–∞ –Њ–±—Г—З–µ–љ–Є–µ—В–Њ —Б–∞ —Б—К–±—А–∞–љ–Є –і–∞–љ–љ–Є –њ–Њ–і —Д–Њ—А–Љ–∞—В–∞ –љ–∞ –≤–Є–і–µ–Њ –Њ—В –µ–і–љ–Њ-–µ–і–Є–љ—Б—В–≤–µ–љ–Њ –Ї—Г—З–µ, –Љ–∞–ї–∞–Љ—Г—В –љ–∞ –Є–Љ–µ –Ъ–µ–ї–њ - –Њ–±—Й–Њ 380 –Ї—А–∞—В–Ї–Є –≤–Є–і–µ–∞, —Б—К–±—А–∞–љ–Є —Б GoPro –Ї–∞–Љ–µ—А–∞, –њ–Њ—Б—В–∞–≤–µ–љ–∞ –љ–∞ –≥–ї–∞–≤–∞—В–∞ –љ–∞ –ґ–Є–≤–Њ—В–љ–Њ—В–Њ, –Ї–∞–Ї—В–Њ –Є –і–∞–љ–љ–Є –Њ—В —Б–µ–љ–Ј–Њ—А–Є, –њ—А–Є–Ї—А–µ–њ–µ–љ–Є –Ї—К–Љ –Ї—А–∞–Ї–∞—В–∞ –Є —В—П–ї–Њ—В–Њ –Љ—Г. –Ъ–µ–ї–њ –µ –њ—А–Њ—Б–ї–µ–і—П–≤–∞–љ –≤ —Б–≤–Њ–µ—В–Њ –і—К—А–ґ–∞–љ–Є–µ –≤ –µ–ґ–µ–і–љ–µ–≤–љ–Є—П —Б–Є –ґ–Є–≤–Њ—В – –њ–Њ –≤—А–µ–Љ–µ –љ–∞ —А–∞–Ј—Е–Њ–і–Ї–Є –≤ –њ–∞—А–Ї–∞ –Є –Є–≥—А–Є. –Я–Њ–≤–µ–і–µ–љ–Є–µ—В–Њ –Љ—Г –µ –∞–љ–∞–ї–Є–Ј–Є—А–∞–љ–Њ —Б –њ–Њ–Љ–Њ—Й—В–∞ –љ–∞ –і—К–ї–±–Њ–Ї–Њ –Њ–±—Г—З–µ–љ–Є–µ, –∞ –љ–µ–≤—А–Њ–љ–љ–∞—В–∞ –Љ—А–µ–ґ–∞ –µ –Ј–∞–њ–Њ—З–љ–∞–ї–∞ –і–∞ –њ—А–µ–і–≤–Є–ґ–і–∞ –њ–Њ–≤–µ–і–µ–љ–Є–µ—В–Њ –љ–∞ –Ї—Г—З–µ—В–∞—В–∞.
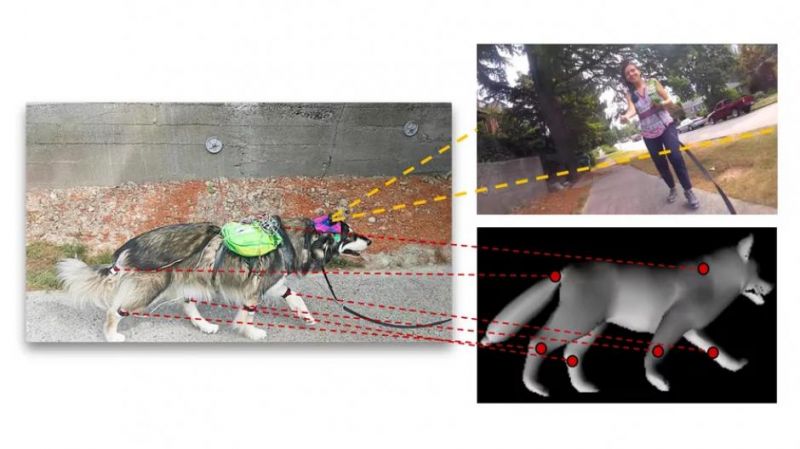
–Т—Б–µ –њ–∞–Ї –≤–Њ–і–µ—Й–Є—П—В –∞–≤—В–Њ—А –љ–∞ –Є–Ј—Б–ї–µ–і–≤–∞–љ–µ—В–Њ –Ъ–Є–∞–љ–∞ –Х—Б–∞–љ–Є –њ—А–Є–Ј–љ–∞–≤–∞, —З–µ –њ–Њ–≤–µ–і–µ–љ–Є–µ—В–Њ –љ–∞ –ґ–Є–≤–Њ—В–љ–Є—В–µ –Љ–Њ–ґ–µ –і–∞ —Б–µ –њ—А–µ–і–≤–Є–ґ–і–∞ —Б–∞–Љ–Њ –і–Њ–љ—П–Ї—К–і–µ – –љ–∞–њ—А–Є–Љ–µ—А –∞–Ї–Њ –≤–Є–і–µ–Њ—В–Њ –њ–Њ–Ї–∞–Ј–≤–∞ —Б—В—К–њ–∞–ї–∞, –Є–Ј–Ї—Г—Б—В–≤–µ–љ–Є—П—В –Є–љ—В–µ–ї–µ–Ї—В —А–µ—И–∞–≤–∞, —З–µ –Ї—Г—З–µ—В–Њ —Й–µ –≥–Є –Є–Ј–Ї–∞—З–Є. –Я–Њ-–Є–љ—В–µ—А–µ—Б–љ–Њ –µ –і—А—Г–≥–Њ—В–Њ, –Ї–Њ–µ—В–Њ —Б–∞ –Њ—В–Ї—А–Є–ї–Є —Г—З–µ–љ–Є—В–µ – —З–µ –Ш–Ш –µ „–Њ—Б—К–Ј–љ–∞–ї“ –љ–µ—Й–∞ –Ј–∞ –Њ–Ї–Њ–ї–љ–Є—П —Б–≤—П—В, –Ї–Њ–Є—В–Њ –љ–µ —Б–∞ –±–Є–ї–Є –Є–Ј—А–Є—З–љ–Њ –њ—А–Њ–≥—А–∞–Љ–Є—А–∞–љ–Є –≤ –љ–µ–≥–Њ. –Ю–Ї–∞–Ј–≤–∞ —Б–µ, —З–µ –Љ–∞–Ї–∞—А –Є –і–Њ–љ—П–Ї—К–і–µ –Њ–≥—А–∞–љ–Є—З–µ–љ–Њ, –і–µ–є—Б—В–≤–Є—В–µ–ї–љ–Њ –Є–Ј–Ї—Г—Б—В–≤–µ–љ–Є—П—В –Є–љ—В–µ–ї–µ–Ї—В –µ –Њ–њ–Њ–Ј–љ–∞–ї —Б–≤–µ—В–∞ –і–Њ –Є–Ј–≤–µ—Б—В–љ–∞ —Б—В–µ–њ–µ–љ —Б–∞–Љ –Є –µ —А–∞–Ј—И–Є—А–Є–ї —А–∞–Ј–±–Є—А–∞–љ–µ—В–Њ —Б–Є, –±–µ–Ј –і–∞ —Б–µ –Њ–≥—А–∞–љ–Є—З–∞–≤–∞ –і–Њ –њ—А–Њ–≥—А–∞–Љ–Є—А–∞–љ–µ—В–Њ. –Ю—В –≤–Є–і–µ–∞—В–∞ –љ–∞ –Ъ–µ–ї–њ –љ–µ–≤—А–Њ–љ–љ–∞—В–∞ –Љ—А–µ–ґ–∞ –µ —А–∞–Ј–±—А–∞–ї–∞ –љ–µ—Й–∞ –Ј–∞ –Њ–Ї–Њ–ї–љ–∞—В–∞ —Б—А–µ–і–∞, –Ї–Њ–Є—В–Њ –љ–µ —Б–∞ –±–Є–ї–Є –Є–Ј—А–Є—З–љ–Њ –≤–Ї–ї—О—З–µ–љ–Є –≤ –і—К–ї–±–Њ–Ї–Њ—В–Њ –Њ–±—Г—З–µ–љ–Є–µ.
–°–Њ—Д—В—Г–µ—А—К—В, —Б—К–Ј–і–∞–і–µ–љ –Њ—В –Х—Б–∞–љ–Є –Є –µ–Ї–Є–њ–∞ —Э, –љ–µ –њ—А–µ—Б—К–Ј–і–∞–≤–∞ –Љ–Њ–Ј—К–Ї–∞ –Є–ї–Є —Б—К–Ј–љ–∞–љ–Є–µ—В–Њ –љ–∞ –Ї—Г—З–µ, –љ–Њ —Г—Б–њ—П–≤–∞ –і–∞ –љ–∞—Г—З–Є –Ї–Њ–љ–Ї—А–µ—В–љ–Є –±–∞–Ј–Њ–≤–Є –њ—А–∞–≤–Є–ї–∞ –Ј–∞ –њ–Њ–≤–µ–і–µ–љ–Є–µ—В–Њ –љ–∞ —В–µ–Ј–Є –ґ–Є–≤–Њ—В–љ–Є –Є —В–µ—Е–љ–Є—В–µ –њ—А–µ–і–њ–Њ—З–Є—В–∞–љ–Є—П. –°–ї–µ–і –≤—А–µ–Љ–µ —В–µ —Б–µ –љ–∞–і—П–≤–∞—В –і–∞ —Г—Б–њ–µ—П—В –і–∞ —Б—К–Ј–і–∞–і–∞—В —А–Њ–±–Њ-–Ї—Г—З–µ, –Ї—К–і–µ—В–Њ –і–∞ –≤–Ї–ї—О—З–∞—В –≤—Б–Є—З–Ї–Њ –љ–∞—Г—З–µ–љ–Њ –Њ—В —В–Њ–Ј–Є –њ—А–Њ–µ–Ї—В –Є –і–∞ –њ–Њ—Б—В–Є–≥–љ–∞—В –µ—Д–µ–Ї—В–Є–≤–µ–љ –њ—А–Њ—В–Њ—В–Є–њ —Б –∞–і–µ–Ї–≤–∞—В–љ–Њ „–Ї—Г—З–µ—И–Ї–Њ“ –њ–Њ–≤–µ–і–µ–љ–Є–µ.
–Ю—Й–µ –њ–Њ —В–µ–Љ–∞—В–∞
–Ъ–Њ–Љ–µ–љ—В–∞—А–Є (0)







–Ю—Й–µ –Њ—В HiEnd


–Я—А–µ–њ–Њ—А—К—З–∞–љ–Њ





–Ь–Њ–ґ–µ –Ф–∞ –•–∞—А–µ—Б–∞—В–µ




–Ш–Ј–±—А–∞–љ–Њ –Њ—В —А–µ–і–∞–Ї—В–Њ—А–∞
–°–µ–ї–µ–Ї—Ж–Є—П –Њ—В —Б—В–∞—В–Є–Є –Є —А–µ–≤—О—В–∞ –Њ—В —А–µ–і–∞–Ї—В–Њ—А–Є—В–µ –љ–∞ HiComm




