



Робот с размерите на тостер направи важна крачка към автономната навигация в Космоса. Изследователи от Станфордския университет успешно демонстрираха за първи път система за управление, базирана на машинно обучение, на борда на Международната космическа станция.
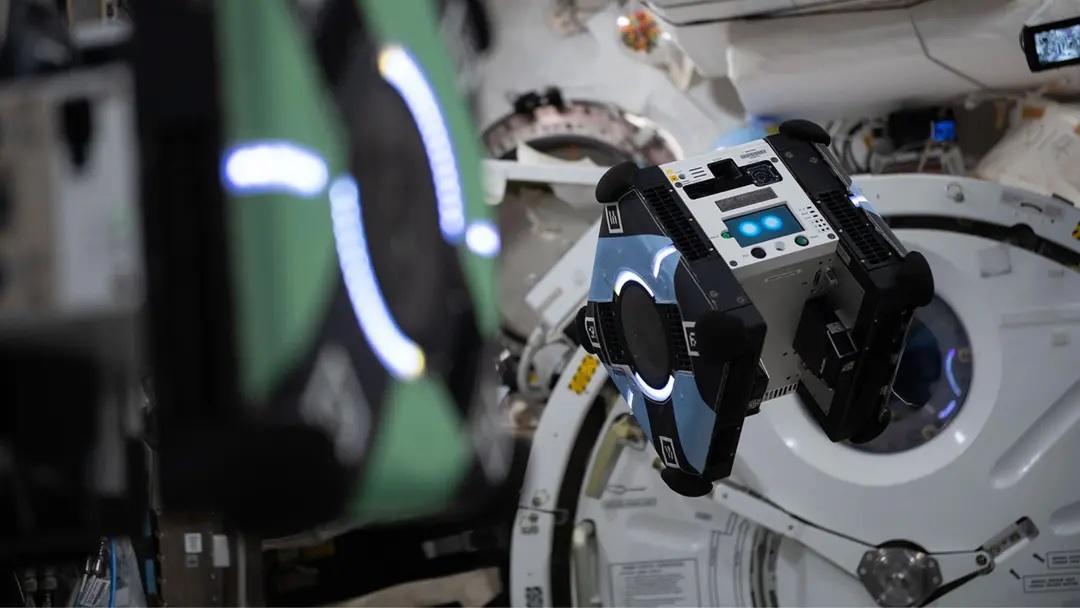
Това постижение бележи повратна точка за роботиката в орбита и отваря вратата за мисии, при които роботите работят с минимален човешки надзор. Astrobee е кубовиден свободно летящ робот, който вече се намира на борда на МКС, и сега послужи като тестова платформа. Новата система му помага да се движи безопасно по тесните коридори и препълнените интериори на станцията без пряк контрол от страна на астронавтите.
Изследването беше публикувано и представено на Международната конференция по космическа роботика (iSpaRo) 2025.
Средата на МКС е комплексна инсталация, взаимосвързана и изпълнена с рафтове за съхранение, компютри, кабели и експериментален хардуер. Тази сложност затруднява планирането на движенията. Традиционните подходи за планиране, използвани на Земята, не се пренасят добре към космическия хардуер.
„Полетните компютри, които изпълняват тези алгоритми, често са с по-ограничени ресурси от тези на земните роботи“, каза старшият автор Марко Павоне.
Той добави, че Космосът въвежда повече несигурност и по-строги изисквания за безопасност от наземната роботика.
За да се справи с това предизвикателство, екипът създаде система за оптимизация, която планира безопасни и осъществими маршрути, използвайки последователно изпъкнало програмиране. Но решаването на всяка стъпка от нулата изискваше значително изчислително време, което забавяше процеса.
Екипът обучи модел за машинно обучение на базата на хиляди предишни решения. Моделът действа като „летящ старт“, предлагайки информирано първо предположение, преди оптимизацията да усъвършенства пътя. Ограниченията за безопасност остават непроменени, но изкуственият интелект ускорява процеса драстично. Павоне го сравни с избора на маршрут въз основа на обичайни пътувания, а не с чертане на теоретична права линия между два града.
„Започваш с нещо, основано на опит, и след това оптимизираш от там“, казва той.
Преди да достигне МКС, системата беше тествана в изследователския център „Еймс“ на НАСА на плаваща роботизирана платформа, която имитира микрогравитация. Когато тестовете започнаха на МКС, астронавтите се занимаваха само с настройката и почистването, преди да се оттеглят. След това екипът на Земята издаде команди чрез космическия център „Джонсън“ на НАСА.
Екипът тества 18 траектории, като всяка от тях беше изпълнена два пъти – веднъж със стандартен студен старт и веднъж с използване на AI-задвижван топъл старт. Резултатите бяха категорични.
„Показахме, че е с 50 до 60% по-бърз, особено в по-трудни ситуации“, казва Банерджи.
Такива включват тесни пространства и сложни маневри, изискващи въртене.
NASA вече е определила системата на ниво 5 по скалата за технологична готовност, което показва, че тя работи в реални оперативни условия. Това намалява риска за бъдещи предложения и експерименти. Гледайки напред, автономността ще бъде от съществено значение с разширяването на космическите мисии. Тъй като роботите пътуват все по-далеч от Земята и мисиите стават по-чести и по-евтини, ние няма да можем винаги да ги управляваме дистанционно от Земята.
Екипът на Павоне планира да развие технологията още повече, като използва по-мощни модели на изкуствен интелект, подобни на тези, които стоят зад съвременните езикови инструменти и системи за автономно шофиране.
Снимка: Pexels/Stanford University
Виж още: Brother VC-500W – цветният етикетен принтер, който подрежда офиса и дома (РЕВЮ)
Още по темата
Коментари (0)







Още от HiEnd


Препоръчано





Може Да Харесате



Избрано от редактора
Селекция от статии и ревюта от редакторите на HiComm




