



Колкото и бързо да се развиват автономните автомобили, те все още не се справят по-добре от хората в определени ситуации. Една от тях, определено, е престрояването в друга лента. Компютърът на самоуправляващите се коли разчита на предварително програмиран модел на трафик или сменя лентите само ако е необходимо, например за избягване на сблъсък. Учени от лабораторията за изкуствен интелект към масачузетския технологичен институт разработиха по-добра технология.
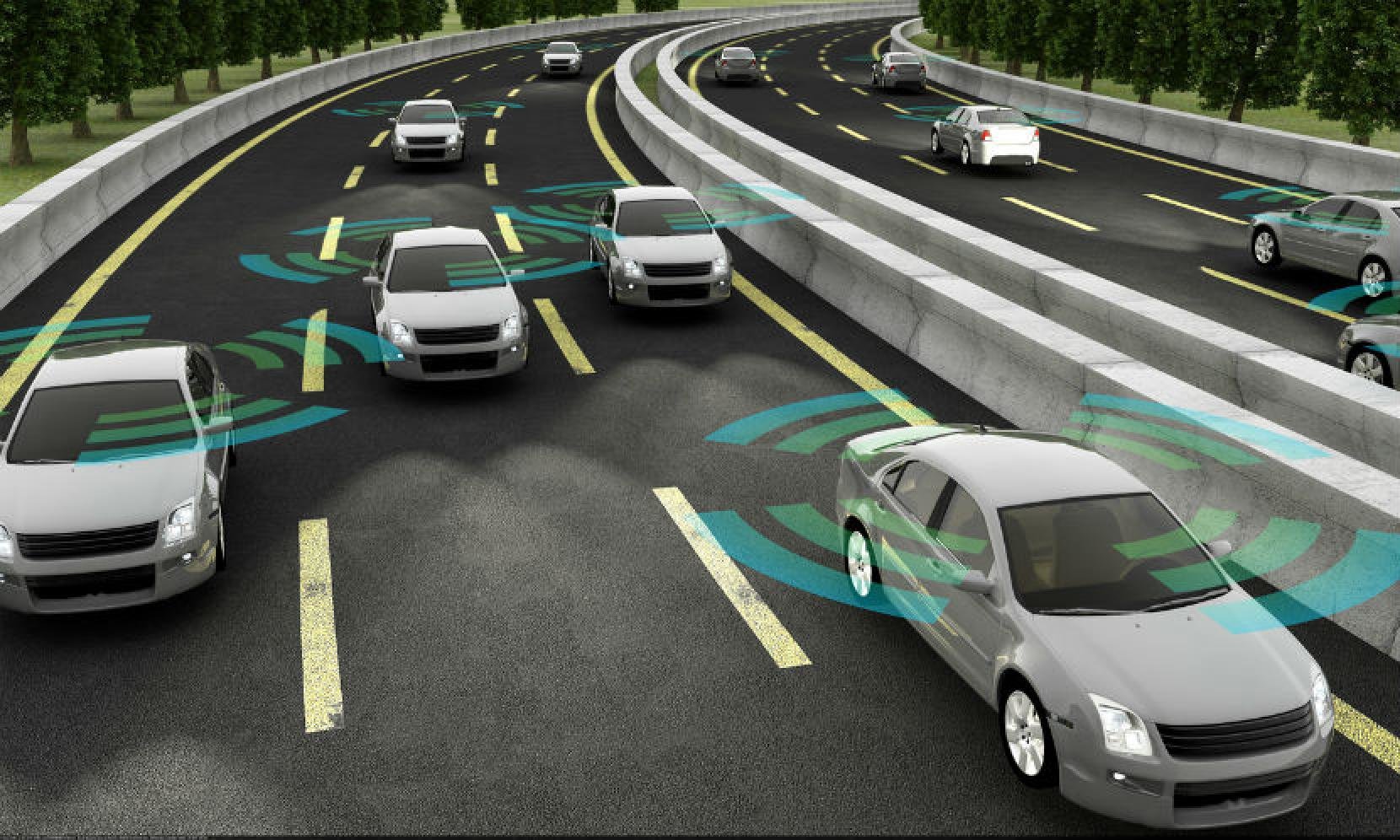
Самата технология работи на сходен принцип с този на "буферните зони". При него компютърът определя накъде се движат другите автомобили, използвайки моментата им траектория. По този начин изчислява каква е вероятността за сблъсък при смяна на посоките.
При сегашните автономни коли това се случва по-рано, за да се спестява време. Учените от Масачузетс създадоха "математически ефективен" подход, който е в състояние да създава нови буферни зони на момента. Процесът зависи от скоростта, с която се движи колата, а дори може да бъде персонализиран, спрямо ниво на агресия. Така например автомобилът ще може да заобиколи бавен шофьор, вместо също да намали скоростта.
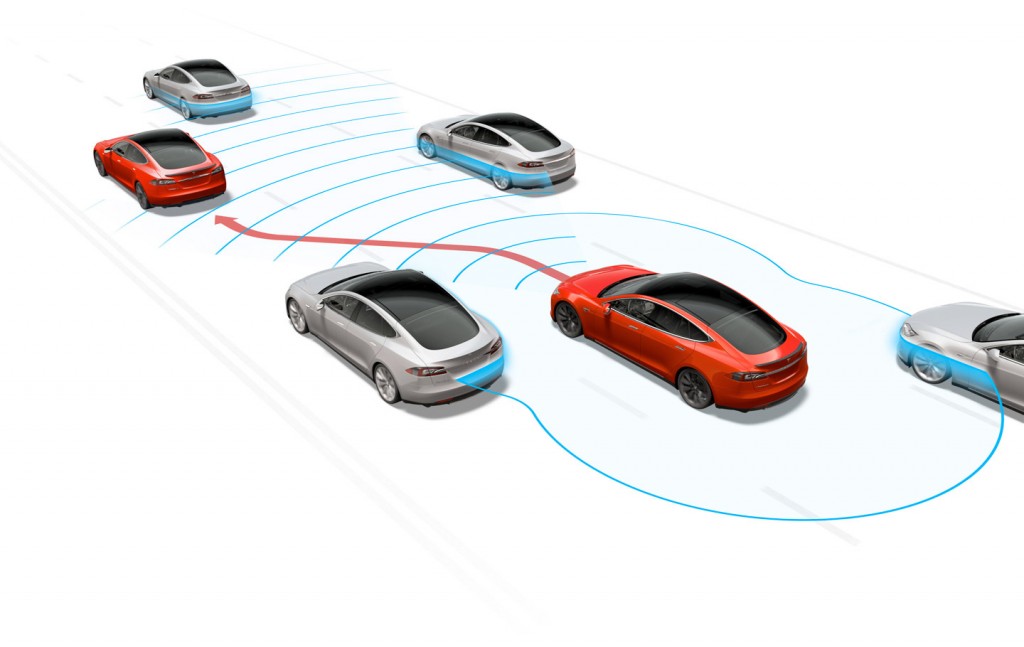
За момента технологията е само алгоритъм, за който не се знае дали ще се използва в реалния живот. От Toyota все пак подкрепят проекта и казват, че е въпрос на време този подход да се използва на пътя. Технологията може да се окаже много по-важна, отколкото звучи. Ако автономните автомобили ще се движат заедно с коли, управлявани от хора, по едни и същи пътища, те ще трябва да могат да се държат като хора в някои ситуации.
Още по темата
Коментари (0)







Още от Tech



Препоръчано





Може Да Харесате



Избрано от редактора
Селекция от статии и ревюта от редакторите на HiComm




