


Едно от най-големите предизвикателства пред роботите е нещо, което хората могат правят толкова лесно, без дори да се замислят. Pазхождаме се из дома ни и виждаме забравена чаша от кафе на масата - можем да я хванем за дръжката, независимо накъде гледа. За роботизираните ръце това е непосилно. Отчасти човешката сръчност се приписва на нашите очи, защото можем да видим ясно обекта, което улеснява хващането.
Прогресът в компютърното виждане позволи на роботите да разграничават между типовете обекти, но този напредък все още не позволява на роботите да разберат формата на даден обект. Това означава, че роботът не може да направи нищо, след като обектът бъде вдигнат. Учени от информационната лаборатория на МIT и лабораторията за изкуственото разузнаване са решили да променят това.
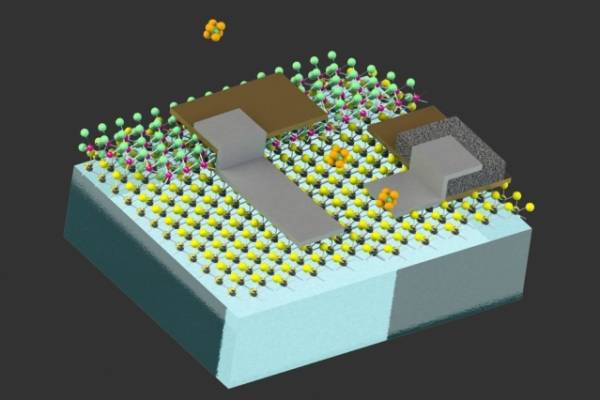
MIT е разработил система, която позволява на робота да изследва произволни обекти и да получи достатъчно визуална информация за тях, за да изпълнява специфични задачи с тях, без да ги е виждал преди. MIT нарича системата „наситени мрежови обекти“ (Dense Object Nets – DON). Тази система разглежда обектите като свързани точки, които образуват координатна система, която служи като визуална пътна карта. Технологията на MIT позволява на роботите да разберат по-добре елементите и да могат да изберат и вдигнат един обект сред множество.
Изследователите казват, че това е важно умение за машини, които се използват за събиране на артикули в компании като Amazon или Walmart. Може би не е далеч денят, в който ще можете да покажете снимка на един чист дом на своя домашен робот и той ще се заеме да разтребва, докато сте на работа.
Още по темата
Коментари (0)







Още от HiEnd

Препоръчано





Може Да Харесате



Избрано от редактора
Селекция от статии и ревюта от редакторите на HiComm




